1678's 2022 Intake
Link
Behind the design
4 bar OTB intakes are built to pull gamepieces off the floor and into the robot, but to do so they put themselves in a precarious situation. Sitting outside the robots frame perimeter, they are susceptible to damage from collisions with the field and other robots. All OTB intake designs are heavily influenced by the design requirements to be robust against impacts and damage, fast, and light.
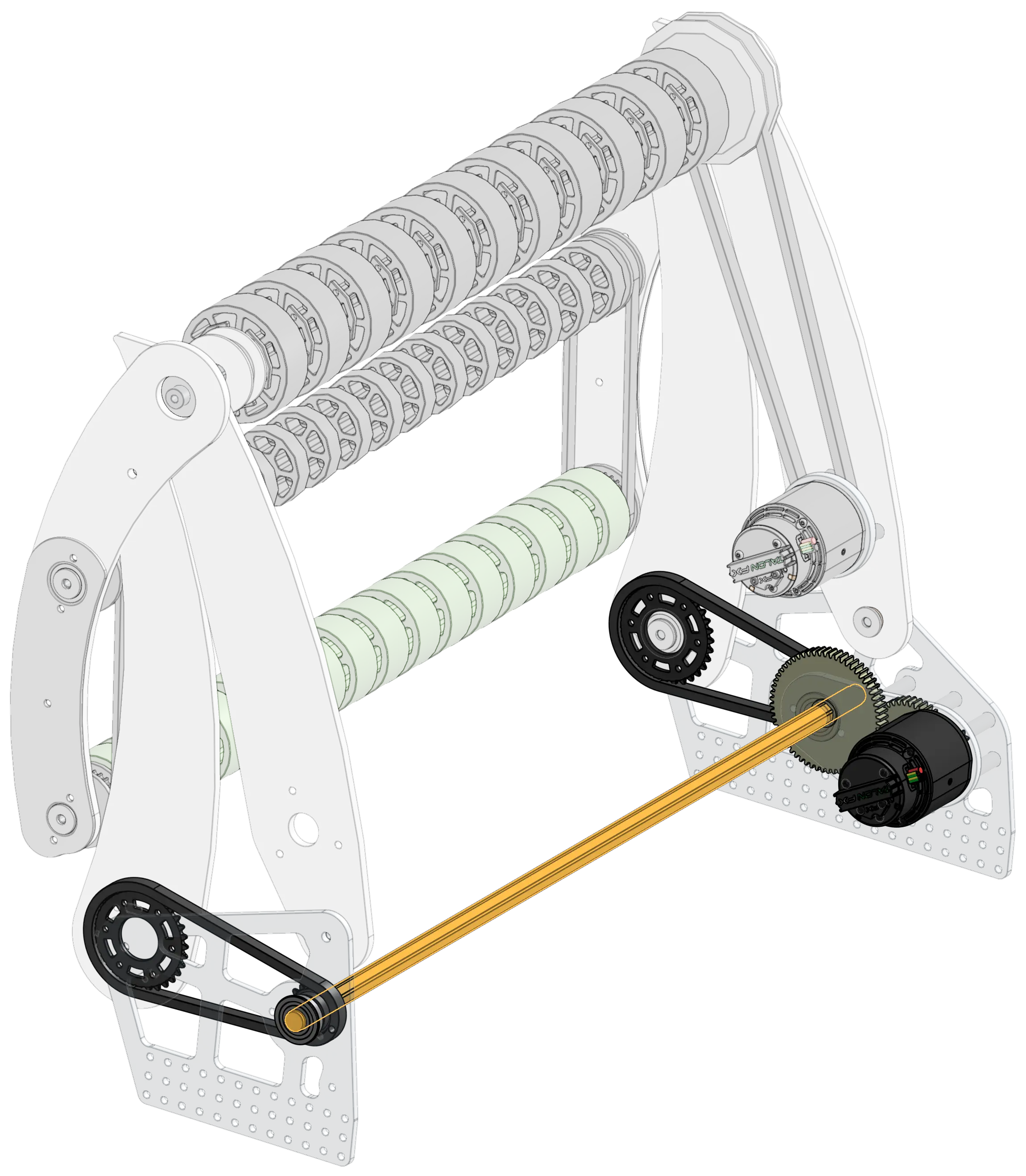 |
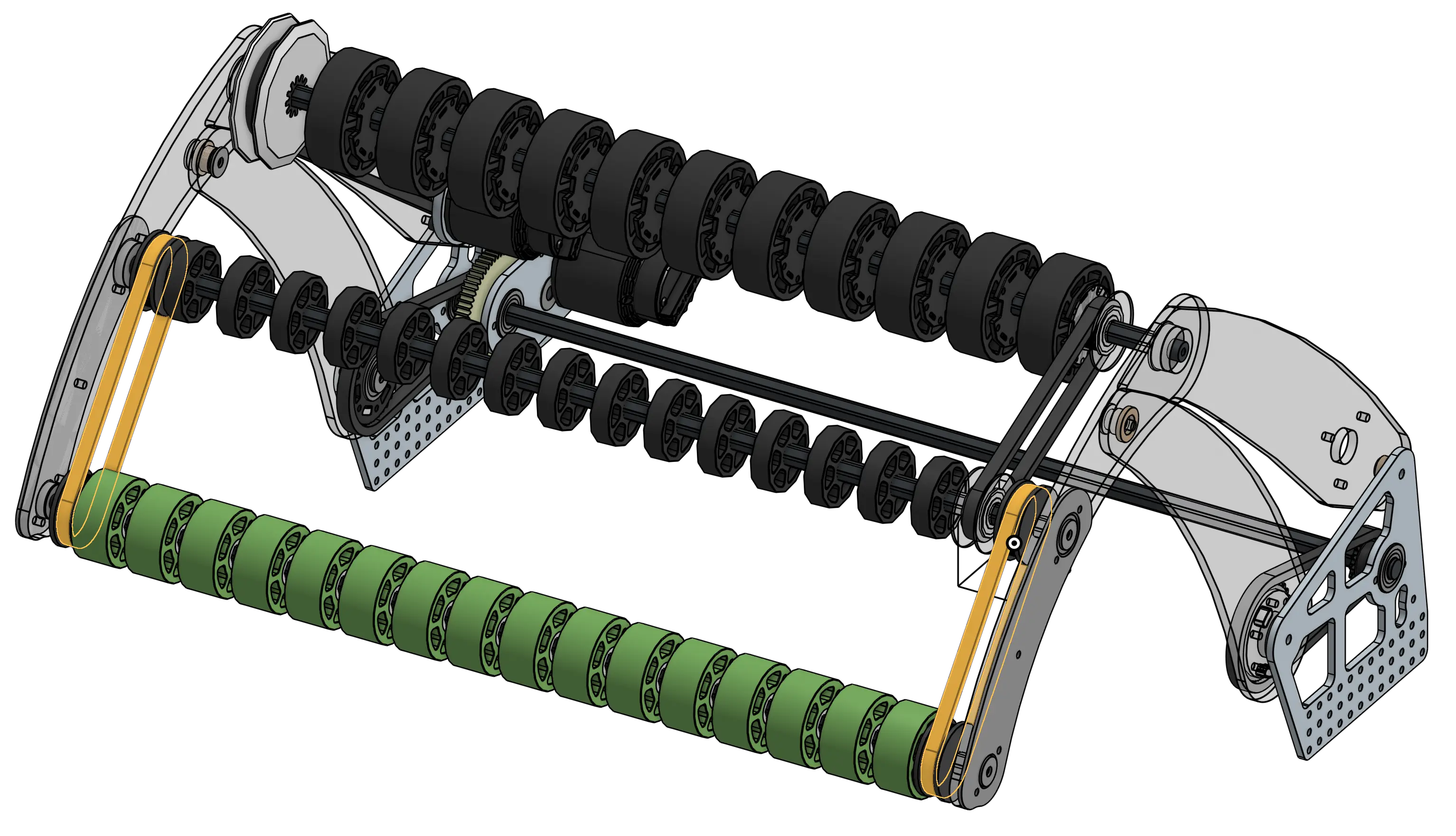
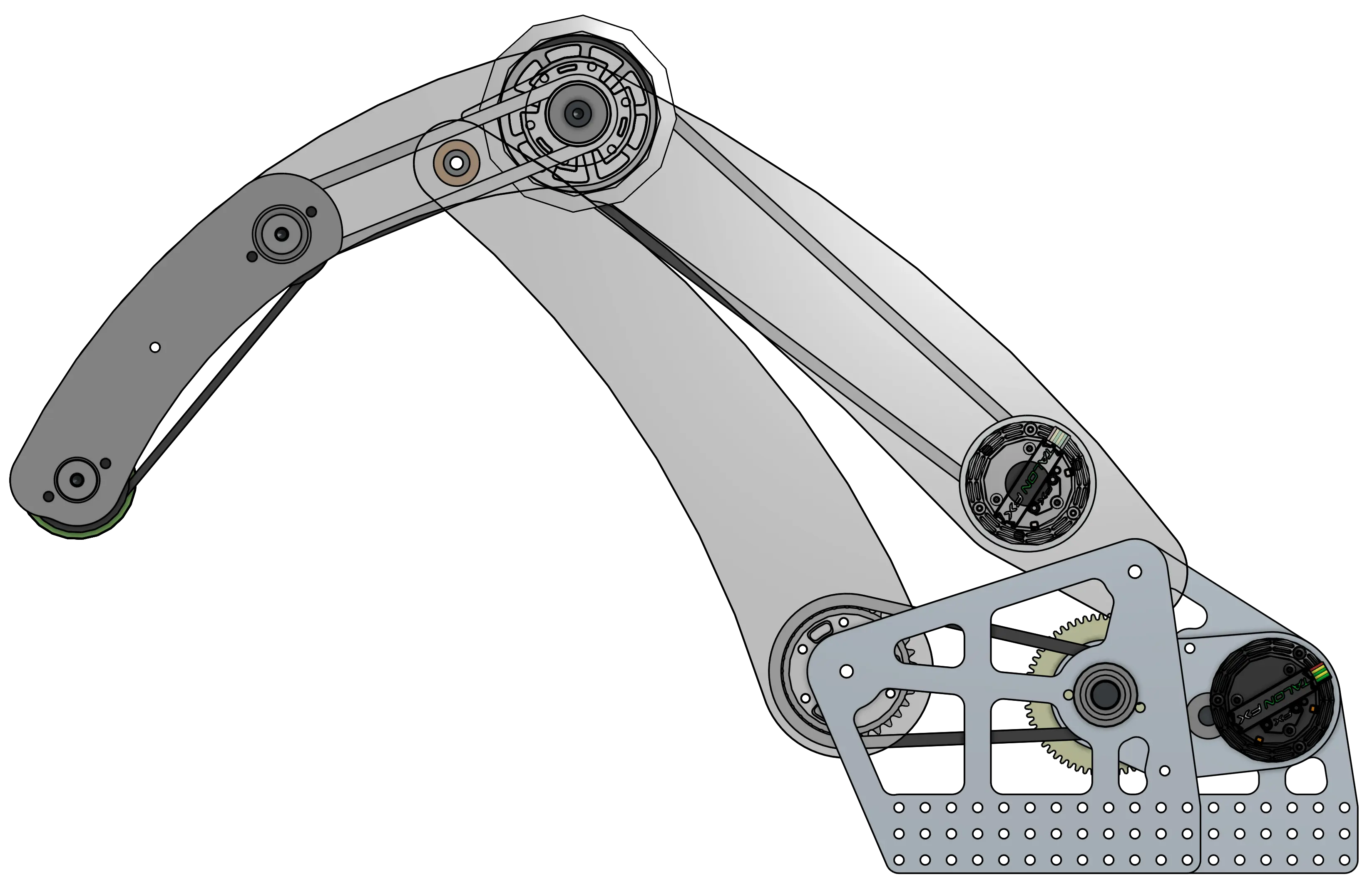
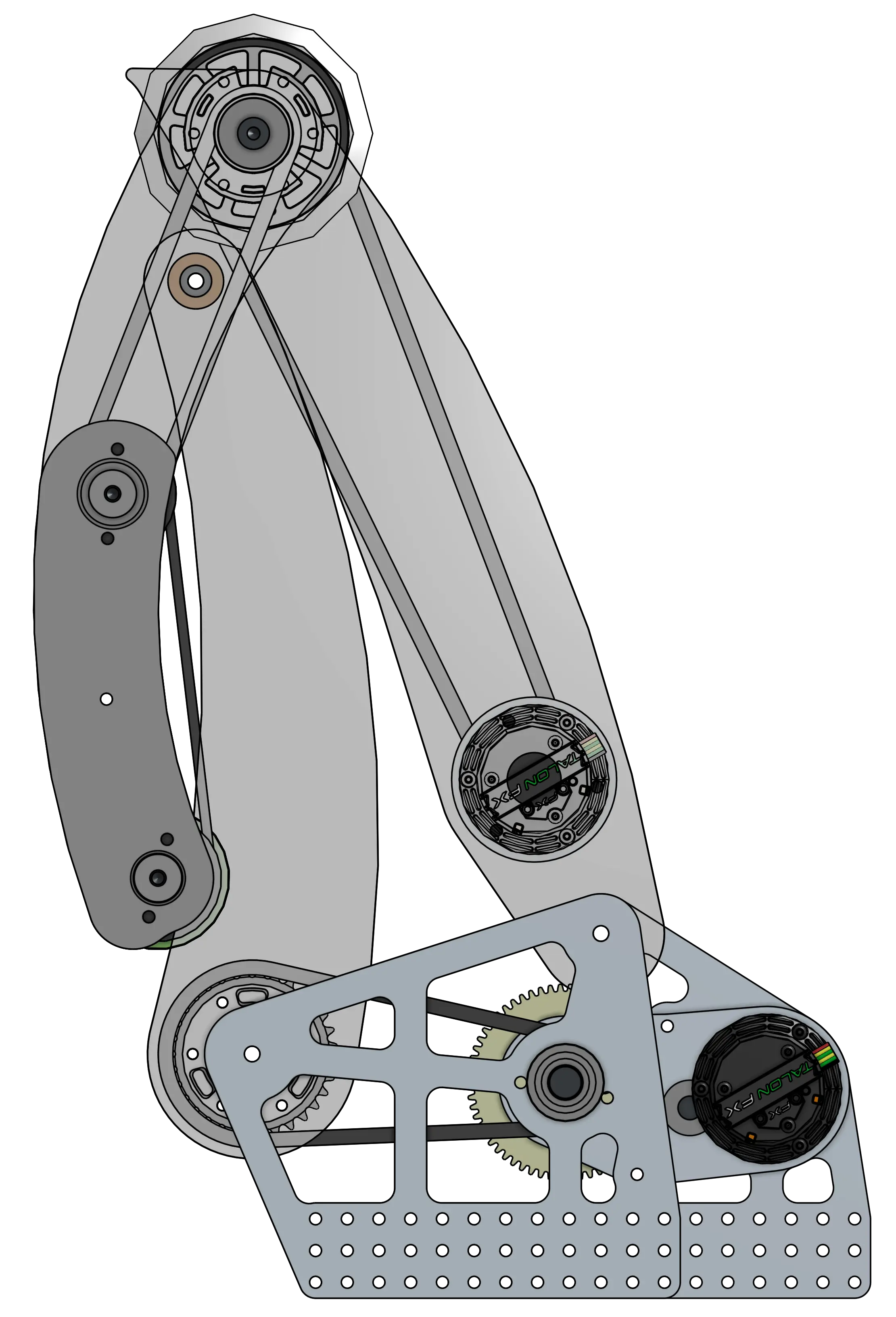
OTB intakes must actuate quickly and accurately, so a motor is a good choice to power them. 1678 used a single Falcon 500 with a 30:1 ratio. This intake featured a torque transfer shaft (highlighted yellow in the image) to transfer power to both sides of the intake. Driving both sides of the intake pivot prevents the entire intake from bending under the loads of extension and retraction. The pivot itself is driven by chain on a 32t plate sprocket. Using a chain for the final reduction and power transmission is optimal due to its ability to absorb shock loads. |  |
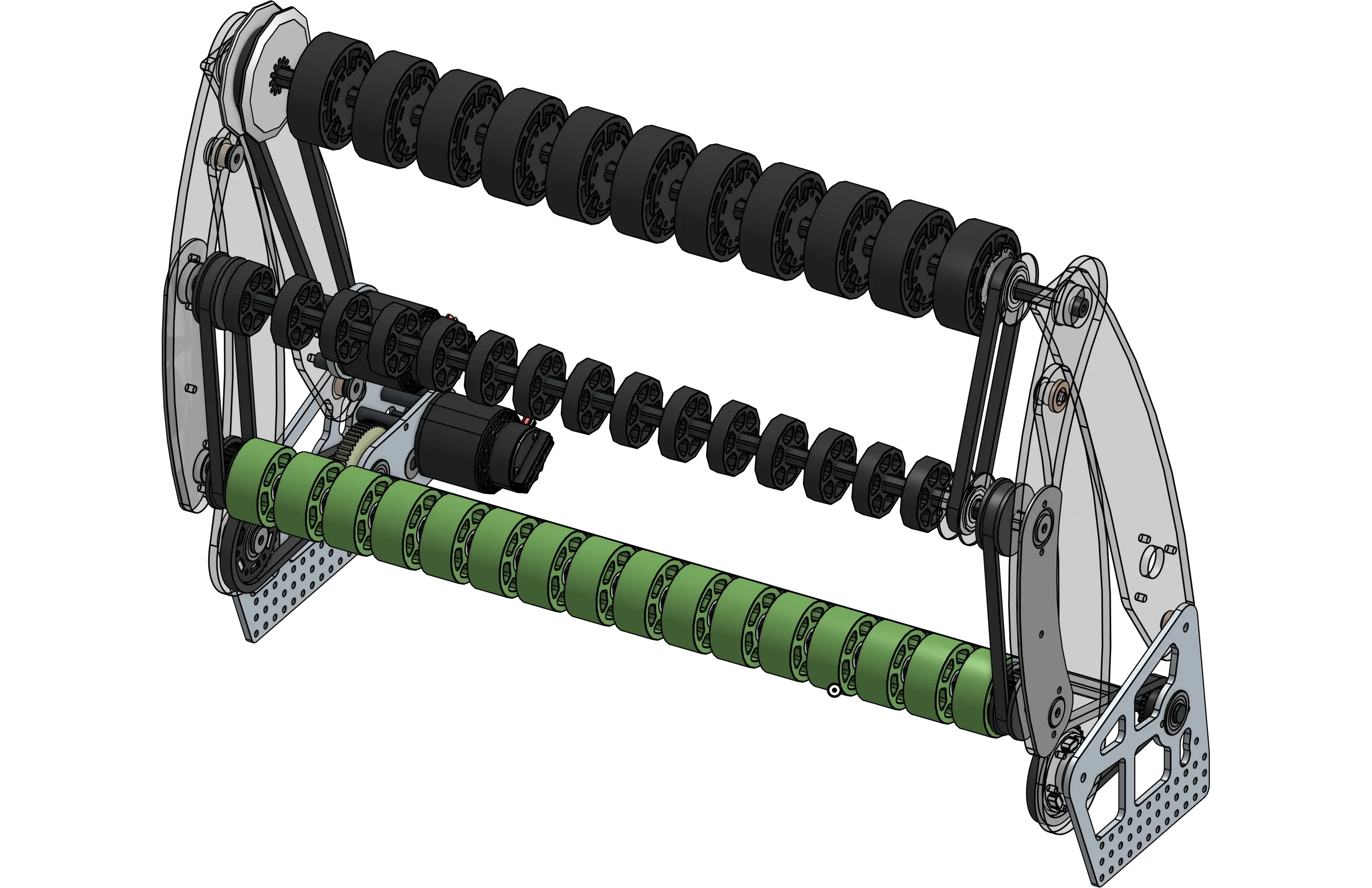
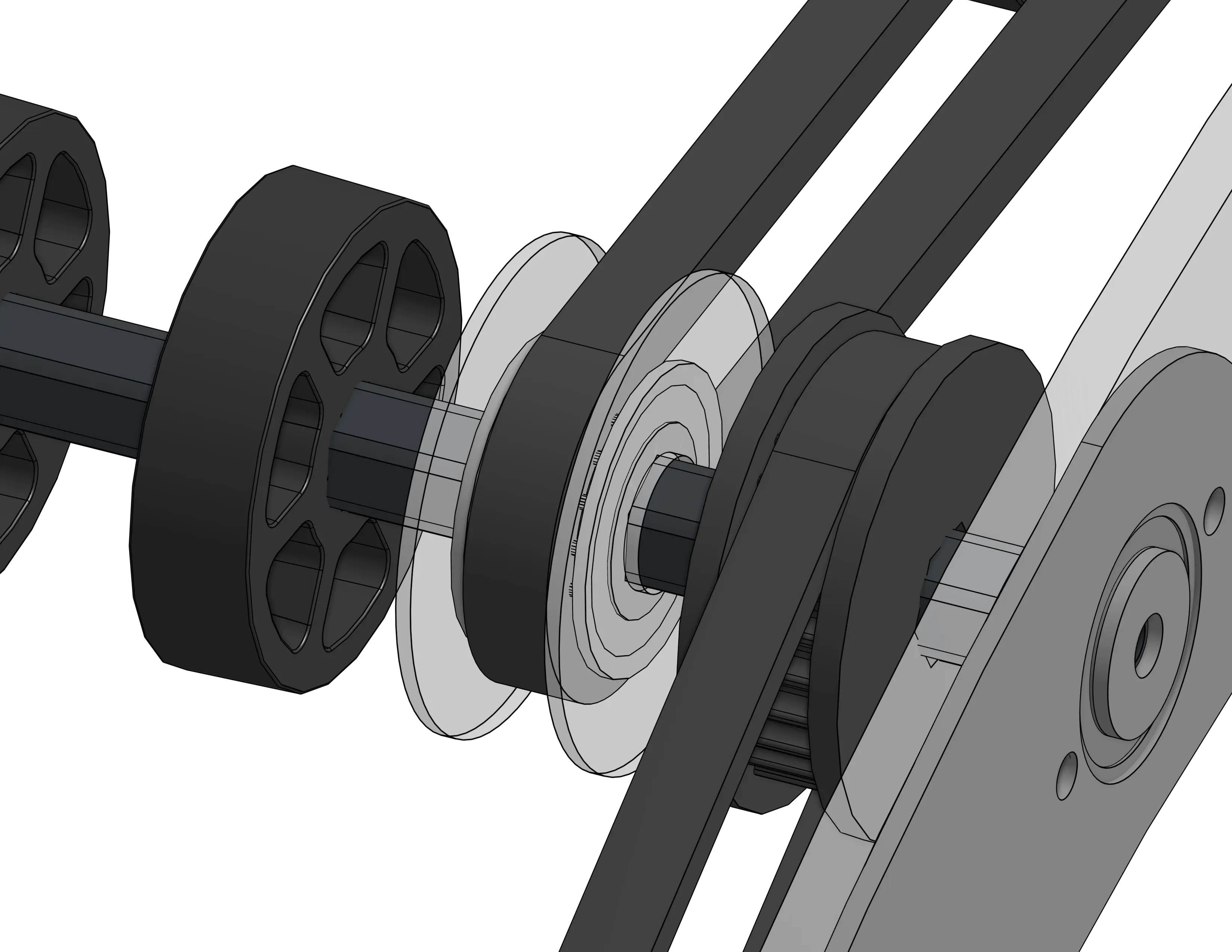
| The intake rollers are powered by a Falcon 500, and power is transferred using HTD 5mm timing belts. The intake is designed with the "touch it own it" design philosophy, and it spans the full width of the robot to make intaking as easy as possible for the driver. The intake is "geared" (using belt and pulley reductions) so that the surface speed of the rollers are approximately 2.5x the speed of the robot. This allows the robot to intake balls even while driving into them at full speed. Each level of wheels is also belted together such that they have equal surface speeds, despite their different diameters. |  |
This intake takes many special considerations to increase its survivability and robustness
 |
 |
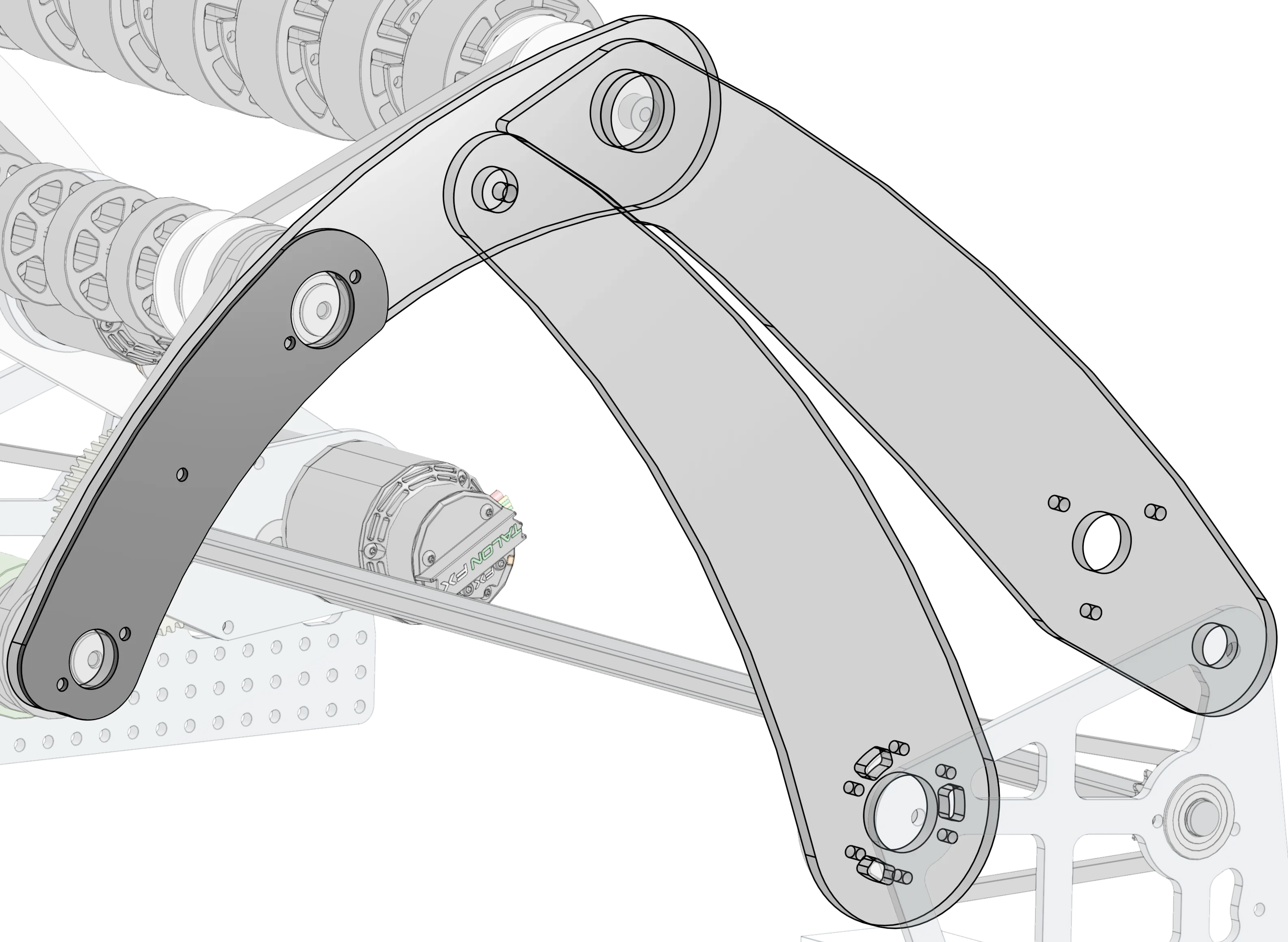 |
Intake plates are manufactured from 1/4" polycarbonate, which is the most common intake material due to its strength to weight ratio and ability to return to its original shape after deforming. This intake has extra aluminum reinforcement on the areas most susceptible to breaking. |
 |
 |
1678 designed their intake polycarbonate plates to hardstop on each other in both the fully extended and retracted positions. This makes programming the intake easier, and helps the robot pass inspection by proving that the intake cannot extend past the frame perimeter extension limit. In a pneumatically actuated intake, having the pivot plates hardstop allows for some error margin on the pneumatic piston's stroke.
See this Intake in Action Here
Tip
Click the images to watch the videos.