2910 Charged Up Drivebase
Links
Behind the Design
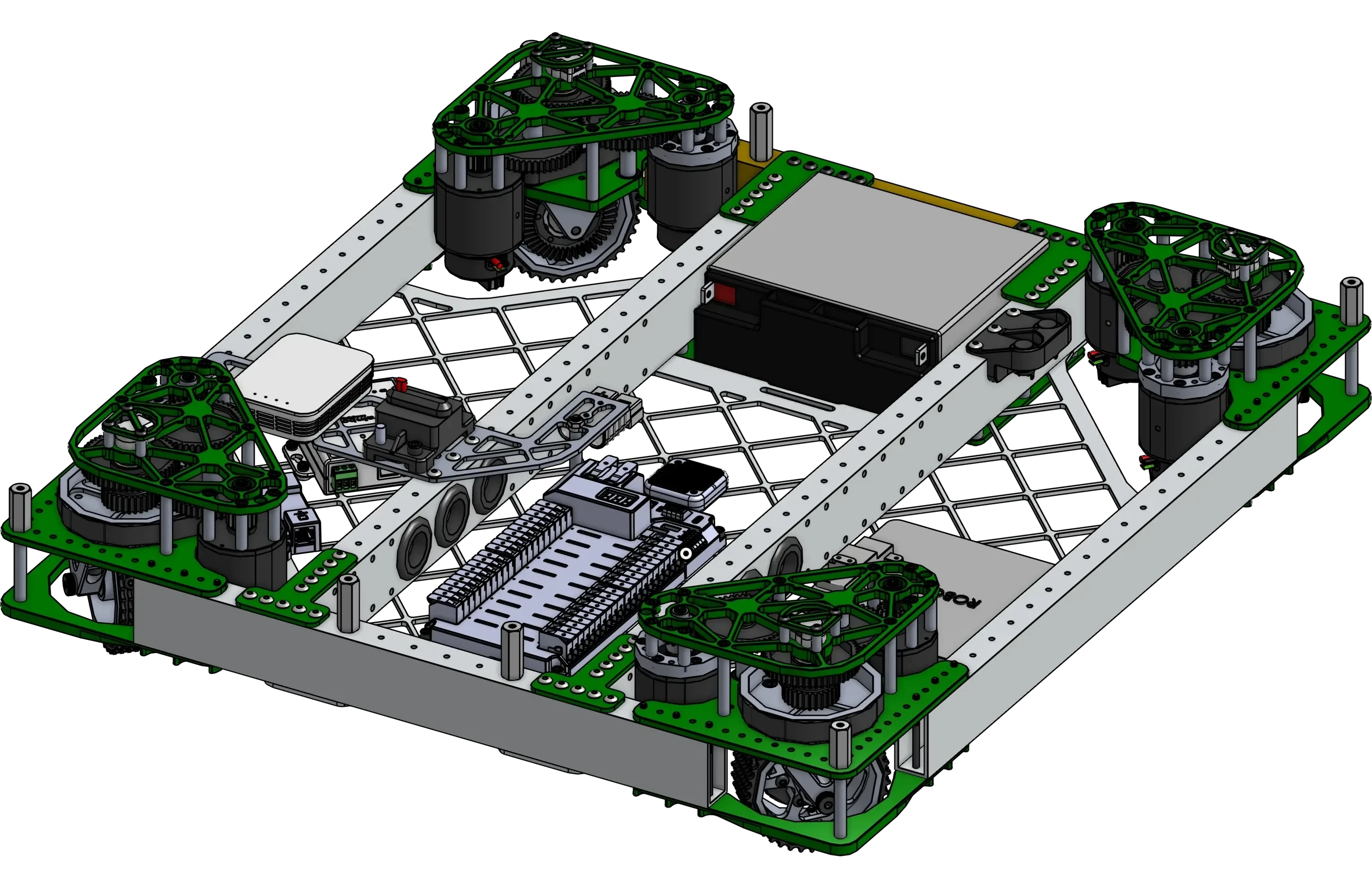
This drivebase embodies all fundamentals of good drivebase design, including the following features:
Rigidity
 | This drivebase is constructed primarily from 1/8 inch box tube, with important cross-members providing rigidity to the structure. Drivebases must be built extremely tough, as they will experience the brunt of each collision while robots travel across the field at high speed. The bellypan offers extra rigidity by holding the frame members parallel with each other. |
Electrical
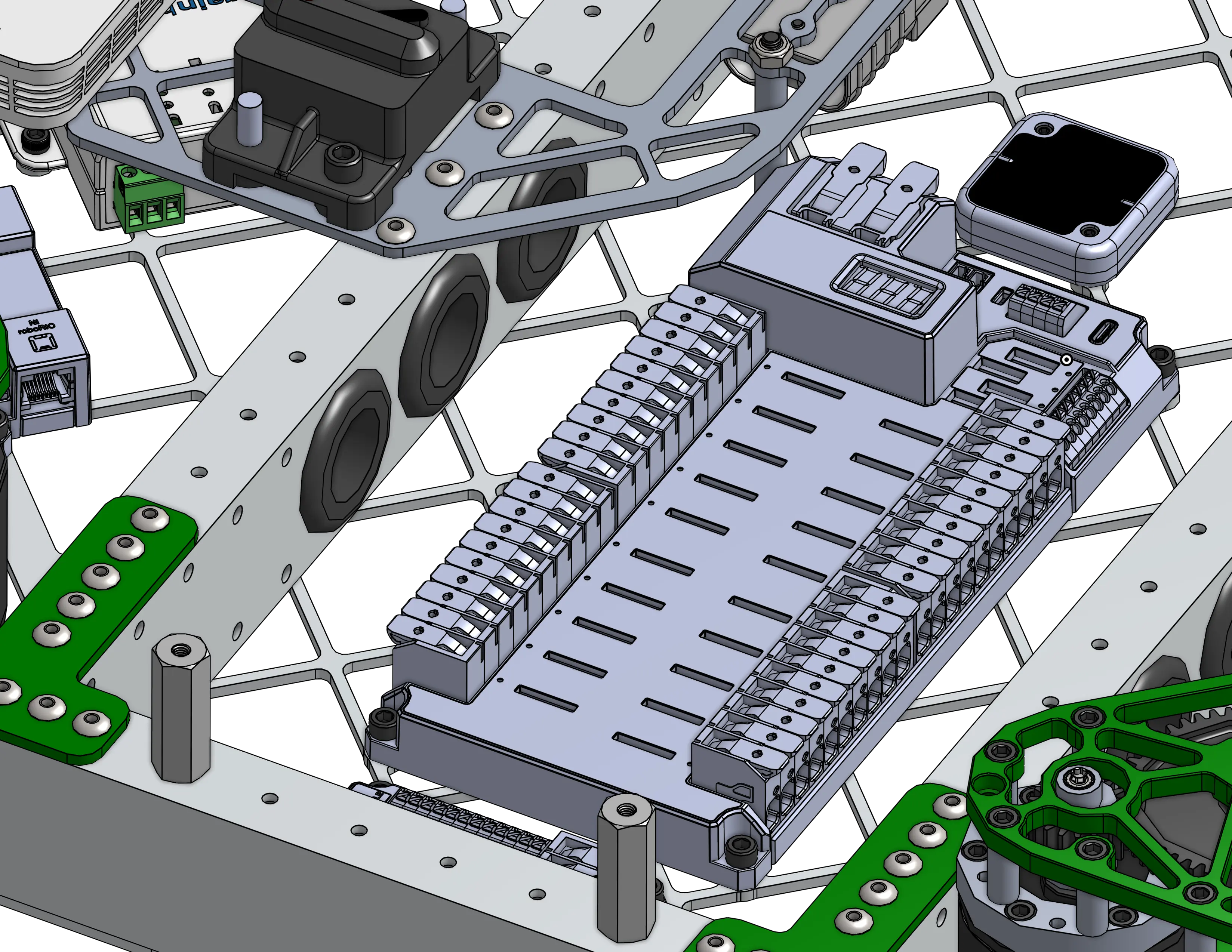 | 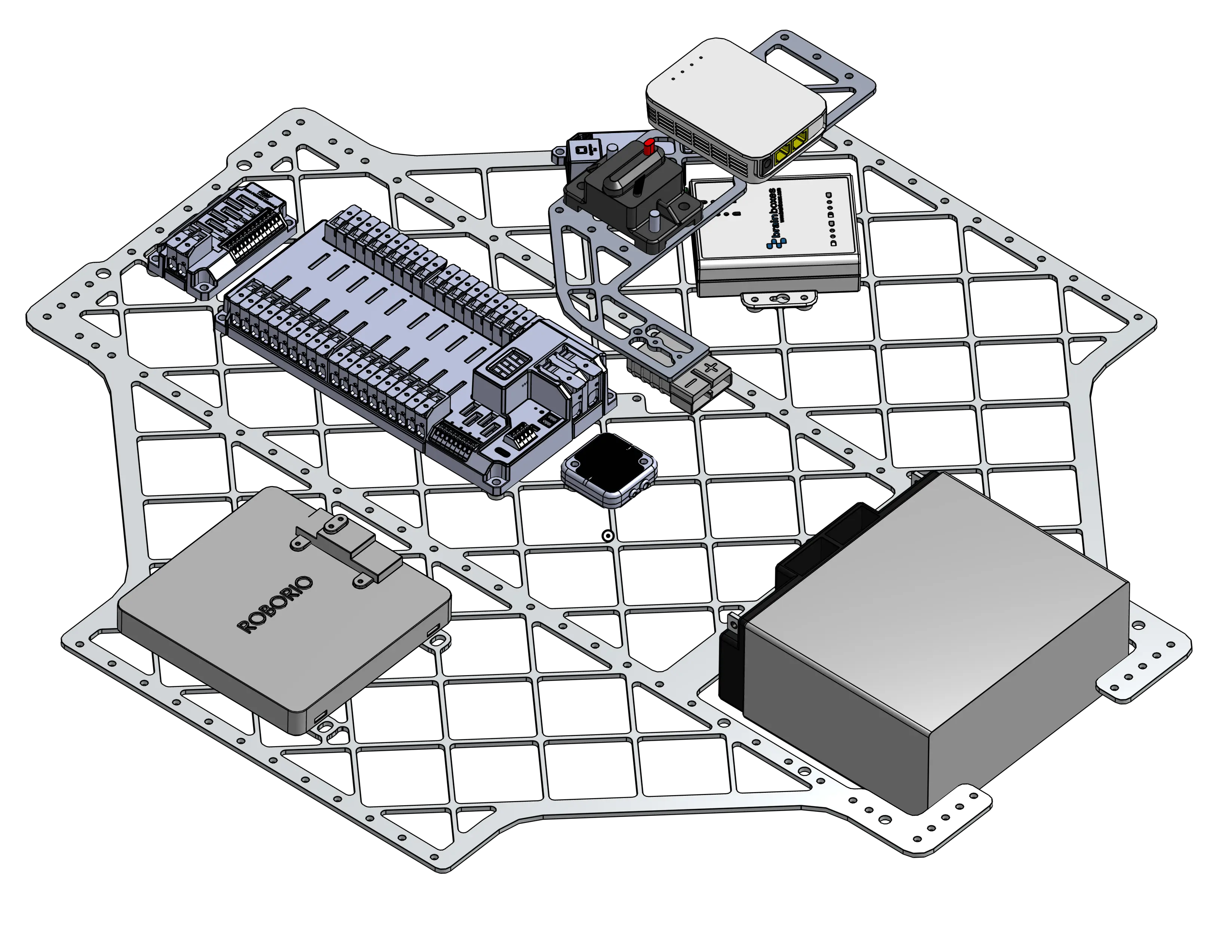 |
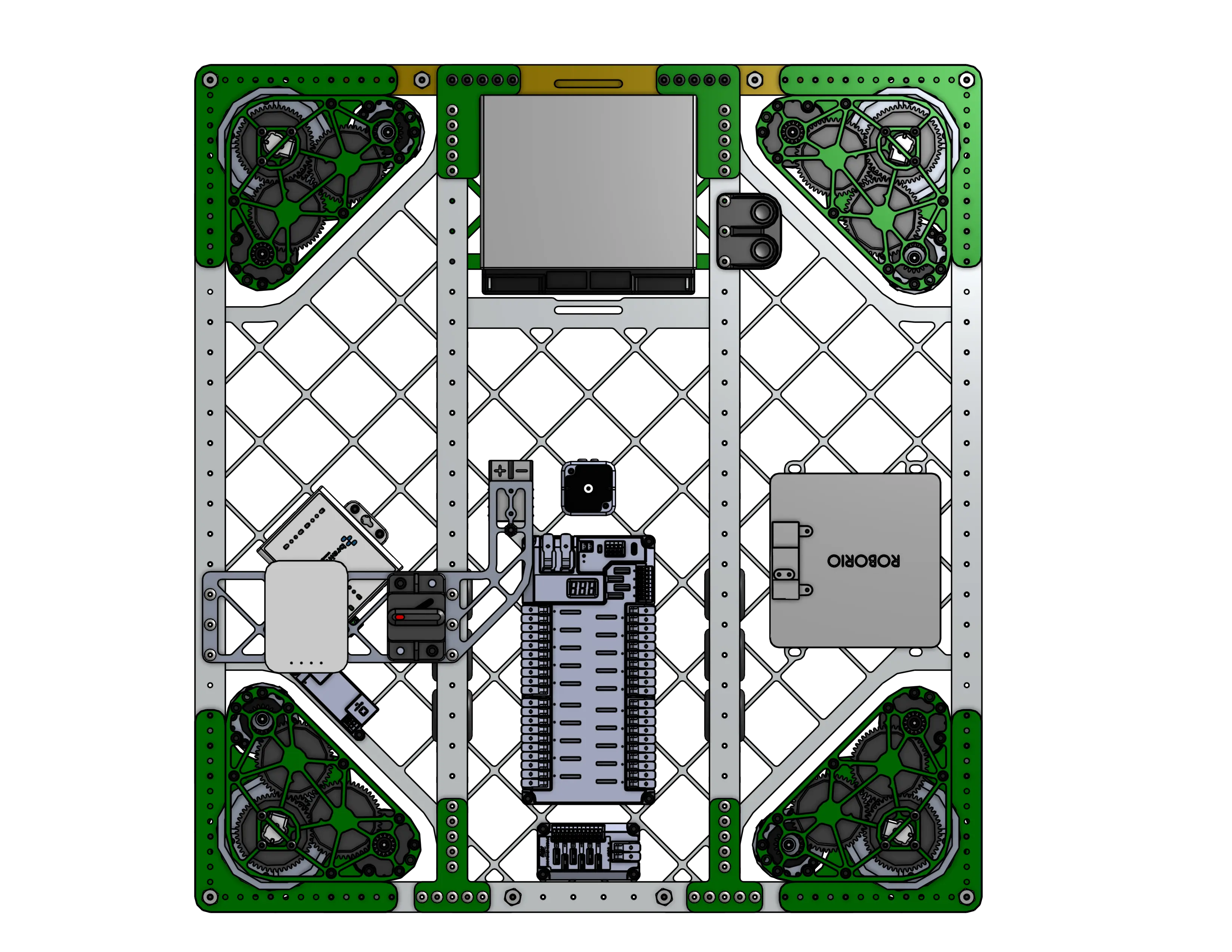
The drivebase usually serves a double purpose as a robot's electrical hub, so it's important to take electronics into consideration. While looking through the CAD, you may notice several key aspects of this drivebase that intentionally accommodate electronics including:
- Pocketed bellypan serves a double purpose of both weight reduction, and providing many points to secure wires with zip-ties.
- All electronics have pre-designed mounting holes
- Holes in the frame-rails around the PDH allow for easy wire routing while keeping wires low in the bellypan and out of the way.